Motor listrik adalah adalah alat penggerak yang menggunakan energi listrik dan mengubah atau mengkonversikan energi listrik menjadi energi mekanik sehingga dapat mentransmisikan energi gerak kepada suatu komponen alat atau suatu komponen mesin.
Sumber: wikipedia.org
Pada dasarnya setiap peralatan atau setiap komponen mesin yang bekerja membutuhkan alat penggerak utama untuk menjalankan atau menggerakkan peralatan transmisi yang terhubung dengan poros-poros yang berotasi pada sudut dan kecepatan tertentu sehingga suatu alat atau suatu komponen mesin dapat bekerja dan menghasilkan produk keluaran sesuai dengan spesifikasi dan tujuan suatu alat atau komponen mesin dibuat atau diciptakan.
Selain motor listrik, ada beberapa jenis motor penggerak lain yang sering digunakan diantaranya motor bakar dan motor diesel. Pengaplikasian motor penggerak ini sangat beragam sesuai dengan kebutuhan dan spesifikasi setiap mesin yang digunakan.
Pengaplikasian motor listrik biasanya digunakan pada peralatan rumah tangga seperti kipas angin, pompa air, dan peralatan perbengkelan seperti kompresor udara serta mesin-mesin produksi yang memanfaatkan penggerak motor listrik.
Dikutip dari Wikipedia.org motor listrik bekerja untuk mengubah tenaga listrik menjadi tenaga mekanik. Proses konversi energi tersebut membentuk elektromagnet sehingga kutub-kutub dari magnet yang sama akan terjadi tolak menolak dan kutub-kutub yang berlawanan akan terjadi tarik menarik.
Pengaplikasian kutub-kutub dari magnet tersebut yang yang diterapkan pada suatu poros dengan arus listrik dalam suatu lilitan kawat akan menghasilkan gaya dan torsi sehingga dapat menggerakkan poros motor tersebut.
Poros motor akan berputar dengan sumber arus yang berasal dari arus searah DC yang berasal dari baterai atau arus bolak balik AC yang berasal dari jaringan listrik PLN.
Motor listrik tersusun atas komponen-komponen yang terdiri dari koil stator atau lilitan tembaga statis yang melapisi poros untuk membangkitkan medan magnet pada rotor dan koil rotor atau lilitan tembaga dinamis pada poros.
Komponen lainnya terdiri dari main shaft atau poros utama pada stator dan rotor, motor housing yaitu komponen yang melindungi komponen-komponen bagian dalam motor dan brush atau sikat tembaga untuk menghubungkan sumber arus listrik dengan koil rotor.
Bearing dan drive pulley merupakan komponen penting untuk menggerakkan putaran poros dimana bearing akan mengecilkan gesekan sehingga poros dapat berputar dengan mulus tanpa adanya hambatan atau gesekan dan terakhir drive pulley akan mensuplai putaran motor kepada komponen-komponen lainnya.
aeroengineering services merupakan jasa layanan dibawah CV. Markom dengan berbagai jenis solusi, mulai dari drafting CAD, pembuatan animasi, simulasi aliran dengan CFD dan simulasi struktur dengan FEA.
Sumber:
https://id.m.wikipedia.org/wiki/Motor_listrik (Diakses pada 4 April 2021)
https://www.otoflik.com/komponen-motor-listrik-fungsinya/ (Diakses pada 4 April 2021)
https://pttensor.com/wp-content/uploads/2021/04/motor-listrik-e1618057374899.jpg200188adminhttps://pttensor.com/wp-content/uploads/2025/05/cropped-Logo-tensor-karya-nusantara-2-300x300.pngadmin2021-04-10 12:13:122026-03-11 03:22:40Motor Listrik (Electric Motor)
Dalam ilmu fisika, banyak sekali perhitungan-perhitungan terkait dengan gerakan dan lintasan suatu benda, baik benda tersebut digerakkan oleh suatu gaya tertentu yang berubah-ubah misalkan gerakan maju-mundur kelinci secara 2D maupun pada suatu kondisi yang teratur sepeerti gerak proyektil yang dipengaruhi gravitasi maupun gerak batu pada ruang angkasa tanpa gravitasi dan hambatan udara.
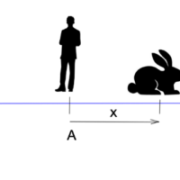
Hal pertama yang kita butuhkan untuk mendefinisikan gerakan-gerakan tersebut adalah sistem acuanya, misalkan kita ingin mendefinisikan suatu kelinci yang bergerak mondar-mandir ke kanan dan ke kiri, kita perlu tahu terlebih dahulu darimana kita lihat kelinci tersebut bergerak. Misalkan pada gambar di bawah ini:
ilustrasi gerakan kelinci
Misalkan manusia yang ada pada gambar di atas berada di titik B, maka jaraknya terhadap kelinci akan berbeda dengan ketika dia berada di titik A maupun titik C. Oleh karena itu, untuk mempermudah kita mengetahui secara pasti di mana lokasi kelinci tersebut, kita harus sepakati dulu titik ukurnya. Lokasi titik ukur ini kita sebut dengan titik pusat koordinat. Kemudian, ukuran jarak dari A ke kelinci kita definisikan sebagai x, sehingga akan menjadi mudah untuk mendefinisikan lokasi kelinci tersebut.
Pada contoh di atas, karena kelinci hanya dapat bergerak ke satu arah, yaitu ke arah x (baik ke kanan/positif maupun ke kiri/negatif), maka gerakan tersebut dikatakan sebagai gerakan 1 dimensi, sedangkan jika dua arah menjadi 2 dimensi begitu pula jika 3 arah menjadi 3 dimensi.
Hal menarik lainya yang dapat kita definisikan selain lokasi dari kelinci tersebut (x), kita dapat juga mendefinisikan seberapa cepat kah kelinci tersebut bergerak mendekati maupun menjauhi titik A, atau kita kenal juga dengan istilah kecepatan. Perhatikan gambar di bawah ini (gambar manusia penulis ubah menjadi titik hitam):
ilustrasi gerak kelinci terhadap waktu
Misalkan kita memegang stopwatch, kita ukur lokasi kelinci pada saat waktu, t = 1 s pada jarak 2 meter, beberapa saat kemudian saat waktu, t = 2 s, lokasi kelinci ternyata berpindah menjadi 4 meter terhadap titik pusat koordinat. Seberapa cepat kelinci ini bergerak dapat dihitung dengan membagi jarak perubahaan koordinatnya terhadap perubahan waktunya, atau secara matematis didefinisikan:
Dapat diperhatikan bahwa delta selalu diawali dengan kondisi akhir dikurangi kondisi awal. Hal ini cukup penting karena jika kondisi awal adalah 2 meter dan akhir 4 meter, maka hasilnya akan negatif. Hasil negatif menunjukkan arah gerak kelinci yang berlawanan dengan arah sumbu X. Hal ini juga menunjukkan bahwa kecepatan selain memiliki nilai tertentu juga memiliki arah tertentu, besaran ini kita kenal juga dengan besaran vektor.
Kemudian, jika kita lebih kritis lagi, mungkin saja pada waktu antara 1 detik dan 2 detik itu kecepatanya tidak selalu 2 m/s, misalkan tepat pada saat 1s kelinci belum bergerak sama sekali kemudian baru bergerak pada waktu 1,5s, maka kecepatan pada waktu 1-1,5s adalah nol (0/1 = 0 m/s) sedangkan pada waktu 1,5-2s adalah 4 m/s ((4-2)/(2-1,5) = 4 m/s), hal ini tentu tidak konsisten dengan perhitungan kita di atas? Kedua kejadian di atas memiliki kondisi yang berbeda, pada kasus pertama (2 m/s) kecepatan yang dimaksud adalah kecepatan rata-rata antara waktu 1s dan 2s, sedangkan pada detik ke 1,5s tersebut disebut juga dengan kecepatan sesaat (instataneous velocity). Dalam ilmu matematika persamaan delta x dibagi dengan delta t merupakan kemiringan dari grafik tersebut secara rata-rata, sedangkan untuk memperoleh kemiringan grafik secara spesifik pada titik tertentu/sesaat waktu (instantaneous) maka persamaan delta berubah menjadi persamaan turunan sebagai berikut:
Untuk memahami arti fisik dari persamaan di atas, berikut diilustrasikan gerakan seekor kelinci yang di-tracking lokasinya terhadap waktu sehingga menghasilkan hubungan lokasi terhadap waktu, X(t) = 2 + 4t – 2t^2 (persamaan ini hanya ilustrasi yang diambil secara sembarang). Maka gerakan kelinci pada sumbu X terhadap waktu akan terlihat seperti gambar berikut ini:
Dari posisi kelinci terhadap waktu, kita dapat mencocokkanya dengan persamaan kuadrat di atas. Kemudian, untuk mencari kecepatanya terhadap waktu, anda dapat menerapkan persamaan turunan yang telah dijelaskan sebelumnya, sehinggai V(t) = dx/dt = 4 – 4.t (saya harap anda menguasai operasi turunan dari materi matematika dasar sehingga tidak perlu saya jelaskan panjang lebar di sini). Dari hasil fungsi V(t) di atas dapat kita lihat bahwa kecepatan selalu berkurang terhadap waktu (mulanya 4m/s dan menjadi -8m/s pada waktu 3 s). Sehingga kita harus pahami, meski kelinci bergerak dengan kecepatan yang terus berkurang, dia pada mulanya tetap “menghadap” ke kanan selama kecepatanya positif, sampai pada waktu t = 1s, kecepatan menjadi nol (terlihat pada grafik) yang menandakan titik balik kelinci menjadi “menghadap” ke kiri karena setelah itu kecepatan menjadi negatif.
Dalam kehidupan sehari-hari cukup bagi kita untuk mengetahui kecepatanya pada setiap saat, namun ternyata disadari oleh Newton bahwa gaya akan berbanding lurus dengan perubahan kecepatan terhadap waktu (yang akan kita bahas pada artikel lainya), sehingga menjadi penting bagi kita untuk memahami kuantitas “perubahan kecepatan terhadap waktu” ini, yang kita kenal juga dengan istilah percepatan. Secara matematis kuantitas ini ditulis sesuai dengan definisinya, yaitu perubahan kecepatan dibagi perubahan waktu, atau:
yang jika kita terapkan pada kasus kelinci di atas kebetulan mengasilkan hasil yang sama antara percepatan rata-rata dengan percepatan sesaat karena merupakan persamaan pangkat 1, yaitu (1) rata-rata, a = (-8-4)/(3-0) = -4 m/s^2 atau (2) sesaat, a(t) = dV(t)/dt = -4. Penting untuk diperhatikan bahwa percepatan ini bernilai negatif, artinya kecepatan berkurang sebesar -4 m/s setiap second.
aeroengineering.co.id merupakan jasa layanan dibawah CV. Markom dengan berbagai jenis solusi, mulai dari drafting CAD, pembuatan animasi, simulasi aliran dengan CFD dan simulasi struktur dengan FEA. Pelajari selengkapnya di sini.
https://pttensor.com/wp-content/uploads/2020/10/rabbit-coordinates-e1615548889746.png200514adminhttps://pttensor.com/wp-content/uploads/2025/05/cropped-Logo-tensor-karya-nusantara-2-300x300.pngadmin2020-10-14 01:52:562026-03-11 02:14:38kinematika partikel I (lokasi, kecepatan dan percepatan)